Global
Global




































-
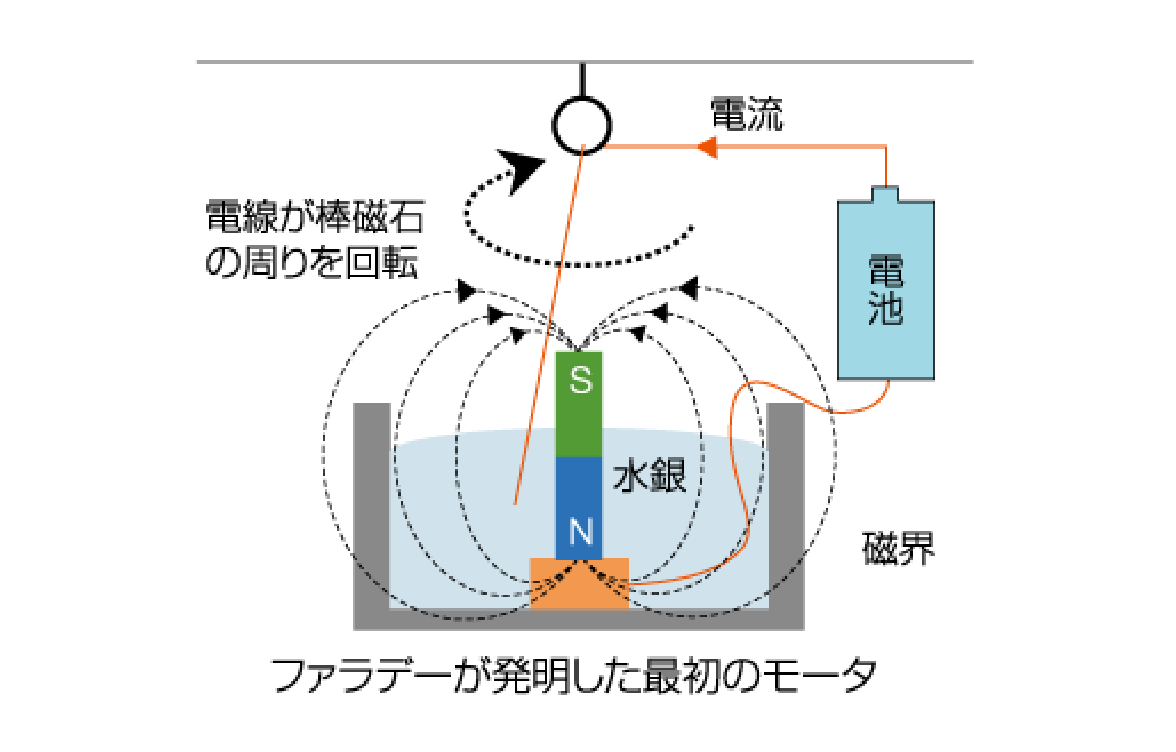
1831年、イギリスの物理学者マイケル・ファラデーが、空芯のコイルの中で磁石を動かすとコイルに電流が流れるという「電磁誘導の法則」を発見しました。電磁誘導の法則は電気エネルギーと機械エネルギーが相互に変換可能であることを証明したのです。これが、モータの発明のきっかけとされています。当時のイギリスは第一次産業革命期でその原動力となったのは蒸気機関でした。電力網もなかった時代に当時の誰もが電気で動くモータの重要性は認識できませんでした。
-
ファラデーの電磁誘導の発見以降、数々のモータが発明されました。1834年には実用的な直流モータがトーマス・ダベンポートによって発明されました。その後、交流でモータを駆動しようと考えたのが、ユーゴスラビアの電気技術者で後にアメリカ人となったニコラ・テスラです。1882年、テスラは公園を散歩中に突然、回転磁界の原理を思いつきました。1887年には回転磁界を使った実用的な二相交流モータ(誘導電動機)を完成させます。その後、変圧器、三相3線式結線といった交流の技術が確立され、電力網が造れていきました。電気が使いやすくなったことで、モータも使われるようになっていきました。
テスラのひらめきがあったからこそ、私たちは電気とモータのある暮らしができます。ちなみに、テスラは「発明王」エジソンの会社に勤めていましたが、エジソンと対立し1年ほど退職しています。そのエジソンの名言を皮肉って、次のような言葉を残しています。『天才とは、99%の努力を無にする、1%のひらめきのことである。』
-
日本で最初にモータが使われたのは、1890年に開業した東京浅草の凌雲閣のエレベータ(15~20人を乗せ1階から8階まで昇降)と言われています。日本にモータを設計・製造する技術は当然無かったので、アメリカから購入された15馬力のモータ(直流電動機)が使用されました。結局、頻繁に故障したために1年も経たずに使用中止になったそうですが、電動化へのチャレンジを強く感じさせるものとなりました。
1890年代になると、日本でも鉱山ポンプなどの用途に海外製モータが使われるようになりました。当時の日本の工業技術水準は欧米に比べかなり低かったため、電気機器のほとんどを海外製品に頼っていました。しかし、よく故障したそうです。徐々にモータ国産化の機運が高まりました。
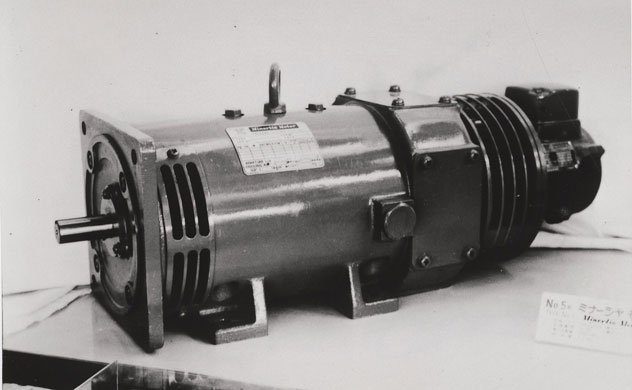
1895年、初の国産モータ(誘導電動機)が誕生しました。そして1915年、純国産の電機品を製造販売する会社として、安川電機(当時、安川電機製作所)が設立され、1917年に受注品第1号となる誘導電動機が世に出ました。それを皮切りに、炭鉱各社からのポンプ用モータと斜坑巻上機用モータの受注へとつながっていったのです。

-
モータが生まれて180年、設計・製造技術や材料技術、エレクトロニクスは進歩し、モータの性能や使いやすさは格段に良くなりました。命令に忠実に動くサーボモータ、直線に動くリニアモータ、携帯電話で振動により着信を知らせる振動モータ、減速機構を組合せたギヤードモータなど、機能や構造など様々な分類によって、モータの名前は付けられています。また、同一構造のモータでも、いくつかの名前に分けることができます。炭坑用で始まった安川電機のモータも、今では産業機械、ロボット、電気自動車などの幅広い分野へと活躍の場を広げました。例えば下表のように、電気自動車用モータに付けられる名前を挙げてみました。このように他との違いが分かるように名前がつけられていった結果、モータの名前は数多くなってしまいました。ややこしい話ですが、これも、「モータが多種多様になった証」と言えます。

-
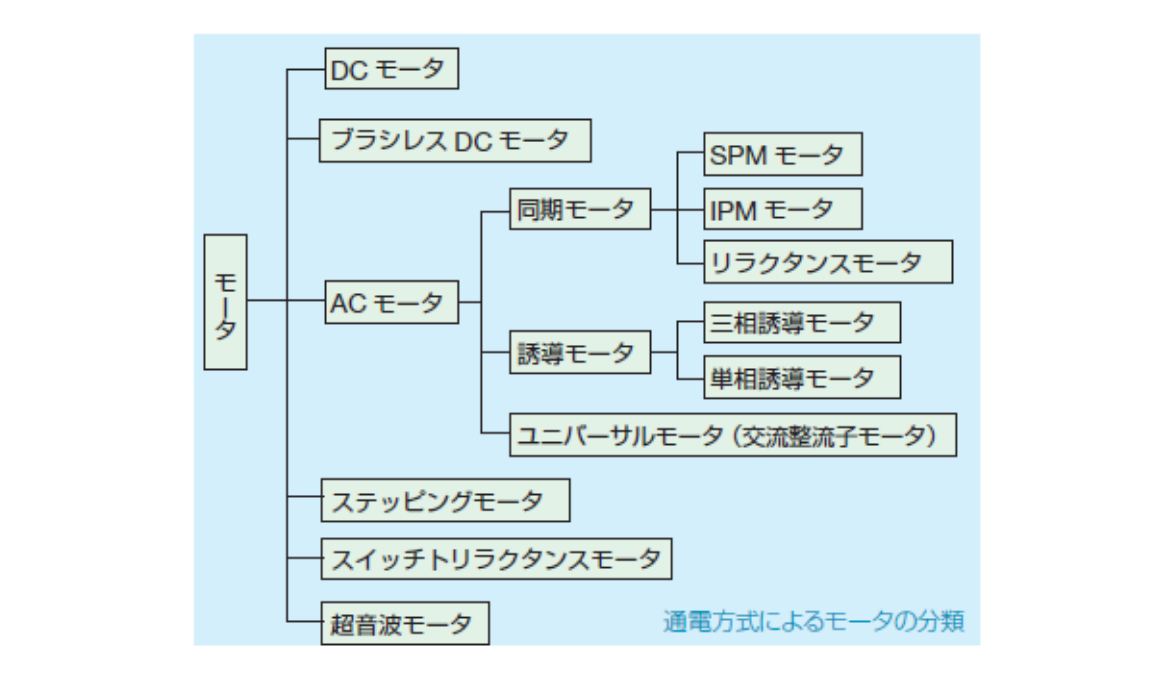
モータに直流(DC: Direct Current)通電するものはDCモータ、それに対し交流通電するものはACモータです。ブラシレスDCモータはDCモータのブラシと整流子を半導体スイッチ素子に置き換え、ブラシを無くしたモータのことをいいます。ユニバーサルモータはDCモータと同じブラシと整流子を持ちながら、家庭用AC100Vを通電して高速に回すことができるモータです。他には矩形波状の電流を通電して回すステッピングモータや、スイッチトリラクタンスモータがあります。超音波モータは圧電セラミックスに高周波電圧をかけて振動させて動かす特殊なモータです。
-
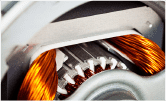
私たちが小学校の理科の実験で使ったモータはDCモータです。模型や家電、携帯電話の振動モータにも使われており最も親しみのあるモータです。モータの構造は大雑把に言うとロータとステータに分かれます。ロータはシャフトとつながって回る部分、ステータはモータの外観を構成する動かない部分のことを言います。
DCモータのステータには永久磁石と電流をロータへ供給するブラシがあり、ロータには巻線と整流子があります。ブラシから整流子へ直流電流が供給されると、整流子に接続された巻線に電流が流れ、トルクが発生します。ここで、巻線と整流子はトルクがいつも同じになるように電流が流れる仕組みになっています。DCモータの特長は何といっても乾電池でも動く手軽さです。モータの線をつなぎ変えるだけで、簡単に回転方向を変えることができます。これが多く利用されている理由です。
-
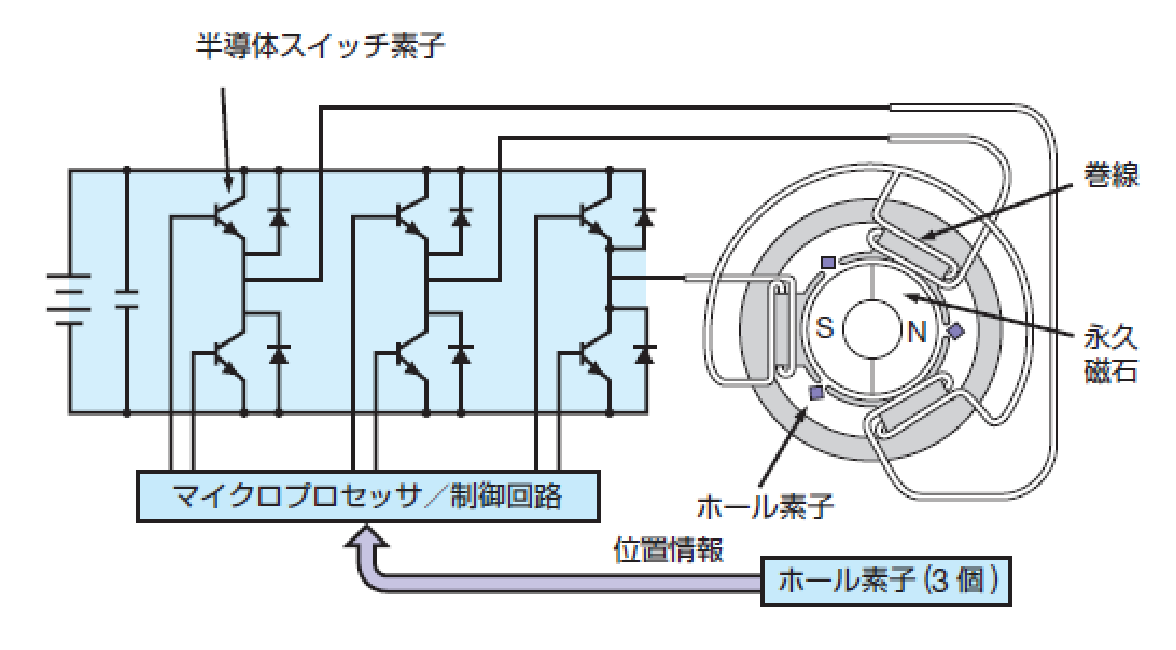
ブラシレスDCモータを一口で言うと「DCモータと同じような特性を持ちながらブラシが無いモータ」になります。その構造はステータに巻線、ロータに永久磁石があります。DCモータにあったブラシと整流子は無く、代わりに半導体スイッチ素子がモータの外部にあります。半導体スイッチ素子はU相、V相、W相の三相巻線のうち常に2相分の巻線のみに直流通電するように動作します。このときホール素子などで検知した永久磁石の位置に合わせて通電を切替え、常に同じトルクを発生するようにしています。
-
同期モータはロータの一端に取付けられた角度センサの情報を使って正弦波駆動されます。三相巻線が作る磁界の回転とロータの回転が同期するので同期モータと呼ばれます。同期モータの構造は基本的にブラシレスDCモータと同じです。そのため、両者が混同して扱われることがよくあります。
同期モータやブラシレスDCモータの特長はDCモータの問題であるブラシの磨耗や電気ノイズを解消できることです。強力なレアアース磁石を使って小形化や高出力化、高効率化を図ることもできます。このため、情報機器、家電、車載用モータ、サーボモータなど幅広く使われています。小型モータの生産台数のうちDCモータが70%、ブラシレスDCモータと同期モータが20%を占めるとまで言われています。
-
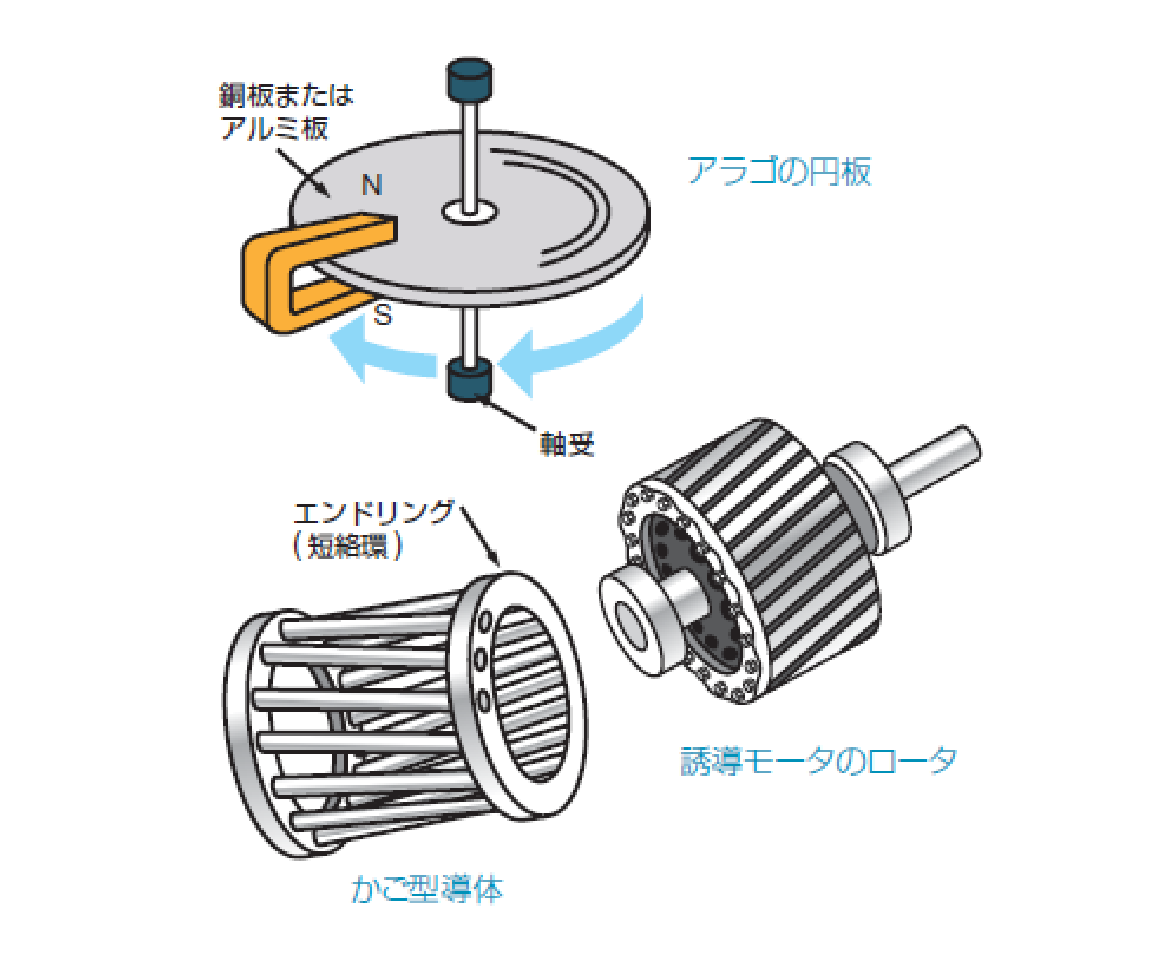
誘導モータの回転原理はフランスの物理学者アラゴーによって発見された「アラゴの円板」が基になっています。アルミ円板をU字型磁石で挟み、そのU字型磁石を回転方向に動かすとアルミ円板も同じ方向に少し遅れて回転するという現象です。U字型磁石の磁界がアルミ円板上で変化することでアルミ円板に渦状の電流が流れ(電磁誘導の法則)、その電流とU字型磁石の磁界との作用で電磁力が発生します。誘導モータはこのアラゴの円板を応用して発明されました。
誘導モータのステータも三相巻線で構成されます。ロータにはかご状のアルミ部分(かご型導体)があります。三相巻線を正弦波駆動すると、その周波数で回転する磁界が発生します。するとアラゴの円板の原理のとおり、磁界の変化を受けるかご型導体には電流が流れ、ロータは磁界の回転よりも少し遅れて回ります。
誘導モータは永久磁石を使うブラシレスDCモータや同期モータに比べ効率が劣っています。しかし、三相AC200Vの商用電源でも回せる、ホール素子や角度センサがなくても回せる、壊れにくい、インバータ駆動で高効率な運転も可能、大きなモータで大出力を出せるなどの特長を持っています。そのため、産業分野や乗り物に数多く使われています。多種多様になったモータの様は生物多様性に似ており、構造や材料の配分の違いで幅広い性質を持っています。

-
-
-
視える化
生産
品質
保全
-
-
-
-
-
-
 サーボモータをもっと知る
サーボモータをもっと知る

サーボモータが支える産業
みなさまの身近な産業を支えるサーボモータをご紹介します。
サーボモータが活躍するアプリケーション
さまざまなところで活躍するサーボモータのアプリケーションをご紹介します。

サーボモータの種類
お客さまのご要望で「回転型モータ」、「リニアモータ/リニアスライダ」、「リニアモータ」など必要な力(トルク)や機構に応じた幅広いモータをご用意しています。