Global
Global



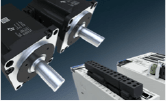


































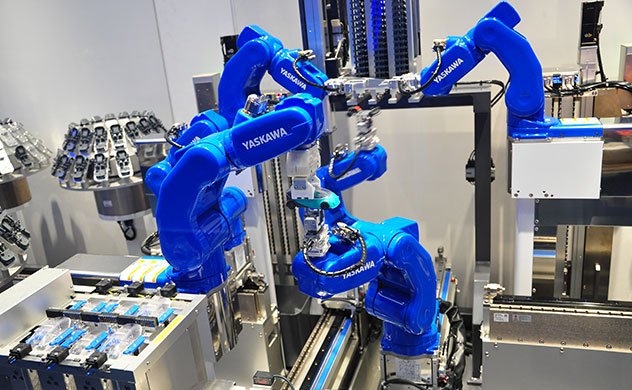
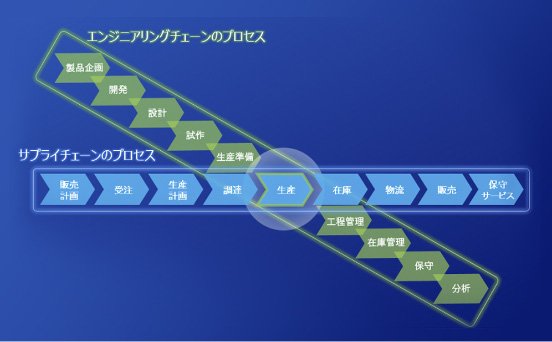
ある工場のラインのなかで産業用ロボットが意図せず止まってしまうとすると、生産に関する一連の動作プログラムのなかで次の手順にあるロボットも作業を進めることができません。こうなると、1台のロボットの停止でライン全体が止まってしまうことになります。
PLC(Programmable logic controller)などのコントローラから一方向で制御する場合は、ロボットは指示された順番で指示された動作しかできないからです。ロボットが自律してほかのロボットと協調して作業していくためには、自ら考え判断する機能を持つことが必要になり、こういったものづくりを”自律分散型のものづくり”と呼んでいます。
サーボモータから出されるトルク値や、振動値、温度といったデータをコントローラに吸い上げることで、ロボットの自律性を高め、自らが考えるようになります。
その他のソリューション
-
生産


-
品質


-
保全