Global
Global





































アーク溶接
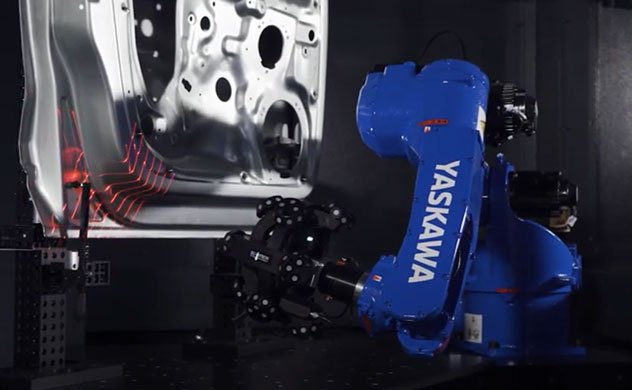
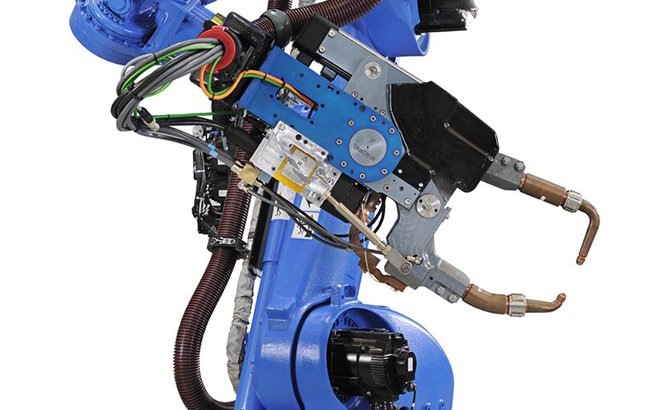
アーク溶接は、接合したい金属とロボット先端に取り付けた溶接トーチの電極(溶接ワイヤなど)との間に放電によるアークを発生させ、その熱によって金属を溶かし接合する溶接方法で、金属同士の接合に広く使われてます。アークの安定化を図り、溶融した金属を大気から保護するために使用するガスの種類や電極が消耗するかしないかなどの違いによって、MIG溶接、MAG溶接、CO2溶接、TIG溶接、プラズマ溶接などの溶接方法を選択していきます。
溶接トーチは軽量で、スポット溶接などに比べて小型の産業用ロボットが利用されます。アーク溶接ではスパッタと呼ばれる溶融金属が飛散しますが、これによって意図せず金属表面に損傷を与えてしまうため、この飛散をいかに少なくするかが品質向上の面から課題になります。当社ではこのスパッタを極限までに削減できるEAGL工法を開発し提供しています。

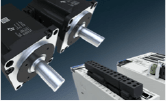
関連する製品
スポット溶接
スポット溶接は、接合したい2枚の金属をガン(スポットガン)の強い力で挟み込み、挟み込んだ部分にガンから大電流を流すことで発生する抵抗熱で溶接する方法です。比較的薄い金属の接合に使用され、自動車ボディーの溶接に広く使用されています。スポットガンは大きく重量があるため、アーク溶接と比較して可搬質量が大きいロボットが利用されます。スポット溶接には、レーザーを使用したもの(レーザースポット溶接)や電極をローラ形状にしたシーム溶接もありますが、単にスポット溶接という場合は通常スポットガンを使用した溶接を指します。
スポット溶接では短いピッチで連続して溶接する場合が多く、スポットガンが重たいこともあり、ボディーのアームをいかに振動させずスムーズに高速で動かせるかが工程作業時間であるタクトタイム短縮のために重要です。当社のスポット溶接ロボットではこの振動を抑える制御方法を開発し実装しています。
関連する製品
ハンドリング
ハンドリングは、アームの先端に取り付けられたハンドによってワーク※をつかんで運ぶアプリケーションです。お客さまのワークに合わせて、小型から大型まで様々なモデルが製造されています。また、ハンドリングするワークも機械部品から食品まで多岐にわたるので、それぞれのワークに合わせて、防じん防滴構造をもったものや食品に配慮した表面処理や万が一口に入れても無害なグリスを使用したものなどのバリエーションがあるのもこのアプリケーションの産業用ロボットの特長です。
さらにワークの位置が定まっていない場合はビジョンセンサーなどを使って対象の位置を検出したり、コンベヤに乗って流れてくるワークをつかむ場合にはコンベヤ同期機能を使ったりするなどのオプション機能も充実しています。
※ワーク:ロボットで作業をする対象となる製品や部品

組立て
組立てはハンドリングした部品を別の部品に取り付けるアプリケーションです。ねじやボルトで部品を取り付ける場合は、アームにねじ締めするためのナットランナーと呼ばれる専用の装置を取り付け、ねじ締めします。組み立てる対象や部品が置かれた状態の位置が定まっていないような場合には、ハンドリング用途と同じように、ずれを補正するためにカメラで位置を検出するビジョンセンサーや、精密なはめ込みが要求される場合には力覚センサーを利用した“ならい動作“をさせるなど、様々なセンサーを活用することもあります。

パレタイジング
パレタイジングはハンドリング用途のなかでも特に工場の入庫や出庫時によく見られる搬送用のパレットにワークを積み付けるアプリケーションです。ワークはお客さまの製品や梱包形態により段ボールや袋物など様々で、それぞれに合ったハンドを準備する必要があります。通常、ワークを振り上げるような動作は必要とされませんが、動作範囲に広さと高さが要求されるので、ロボット本体に組み込まれたモータ数が少ない専用設計のモデルがラインアップされています。
逆にパレットに積み上げられた荷物を積み下ろす作業もあり、この場合にはデパレタイズと呼ばれています。パレタイジング用のロボットも単純な動作の繰返しのため動作の高速性が重要視されます。

塗装
塗装はその名の通り、ワークを塗装するアプリケーションです。手首に取り付けられたスプレーガンで塗料をワークに吹き付けて塗装します。小さな工業製品から自動車や電車のボディーなどの塗装に対応した様々なラインアップを準備しています。吹き付ける塗料は一般的に引火性があり、万が一のトラブルの際にも火災の原因にならないように、ロボット本体内部に常に新鮮な空気を供給し、引火性のある気体が侵入してこない特殊な構造が要求されます。

人協働ロボット
産業用ロボットの多くは作業者への安全性を確保するために安全柵などで完全に隔離する対策をとっていますが、人協働ロボットは作業者と同じ空間で動作できるような安全対策を施したロボットになります。操作面においては、これまでロボットを操作したことがない方でも簡単に操作ができるように、アームを直接持ってパス(軌跡)を設定するダイレクトティーチング機能を備えています。そしてデザイン面においても曲線を多用したり、手指を挟みこむことがない設計にしたり万が一人と接触しても安全に止まるようにセンサーを組み込むなど様々な工夫がされています。主にハンドリングや組立ての用途で利用されていますが、最近は、食品業界など、これまで産業用ロボットを導入してこなかった業界を中心に活用が広がってきています。

バイオメディカル
バイオメディカルは菌の検査や薬剤の調合などバイオや医療の分野で使用されているアプリケーションです。人に変わってロボットが作業するため、作業者が菌や薬品に接触する危険性はなく、作業環境の改善に役立っています。また、薬剤の調合などでは従来のような人による誤差も発生しませんので、安定した作業を実現し、夜間でも作業できますので、生産効率の向上に貢献しています。このアプリケーションのロボットはクリーンな環境を維持することが要求されますので、チリやほこりを発生しない構造やふき取り洗浄などにも対応した構造になっています。

FPD(Flat Panel Display)・太陽電池用ガラス基板搬送
FPD(Flat Panel Display)ならびに太陽電池用ガラス基板搬送は、液晶や有機ELなどのFPDや太陽電池パネルなどに使用される厚さがコンマ数mm程度の薄板ガラス(ガラス基板)を搬送するためのアプリケーションです。大きくてたわみやすい薄いガラス基板を高速で搬送します。ガラス基板は数十mm間隔で重ねてセットされていますので、高速でその隙間にハンドを挿入し、ガラス基板をすくい上げる動作をしなければなりません。ガラス基板のたわみも考慮した動作を要求されるうえ、クリーンルームの中で利用されますので、チリやほこりを出さない工夫がされています。
半導体ウエハ搬送
半導体ウエハ搬送は、半導体のシリコンウエハを搬送するアプリケーションです。通常はお客さまが製作する半導体製造装置の中に組み込まれて使用されます。シリコンウエハは壊れやすく半導体製造装置内での搬送は高速で行われますので、高速で振動の少ない動作が要求されます。これに加え、高速で搬送しても持っているシリコンウエハを飛ばしてしまわないよう、またシリコンウエハそのものを持つことで汚さないよう、ハンドにも工夫を凝らしています。

関連する製品