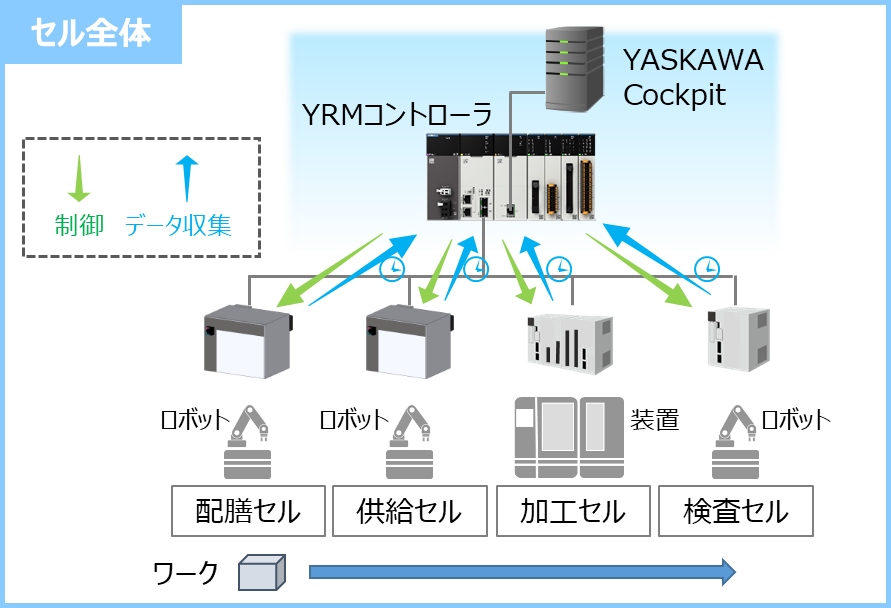
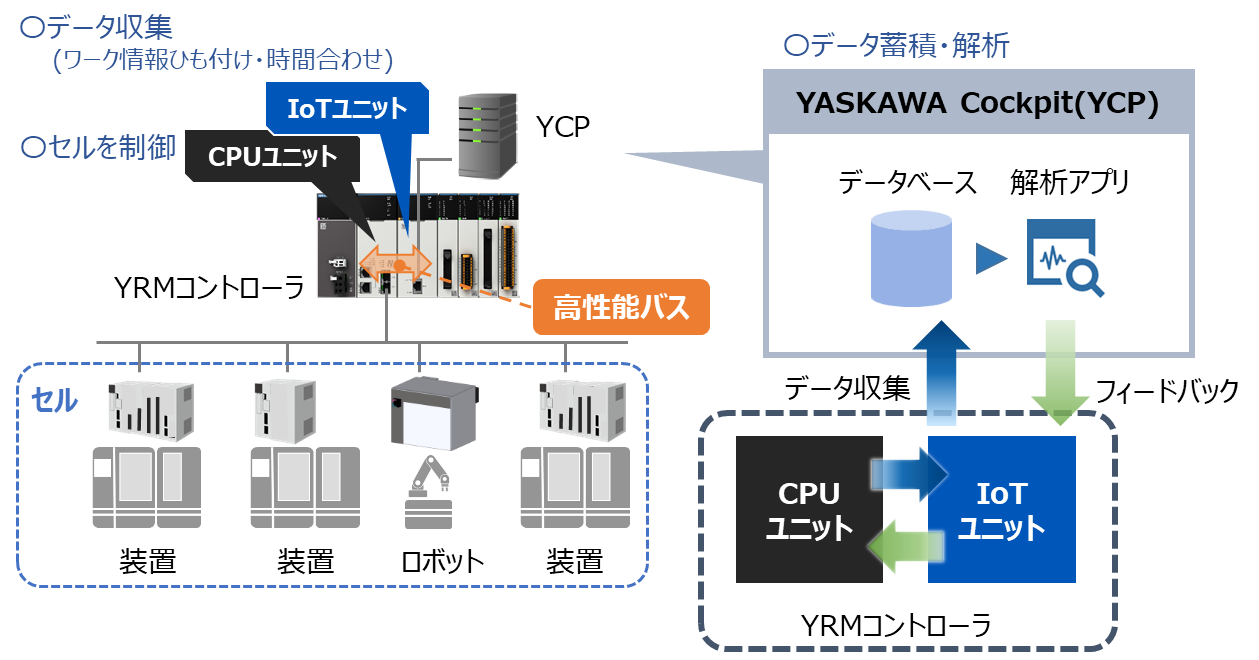
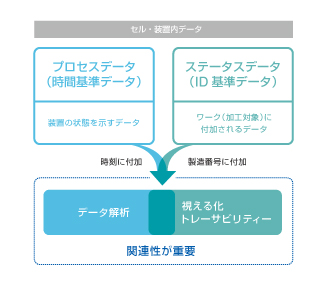
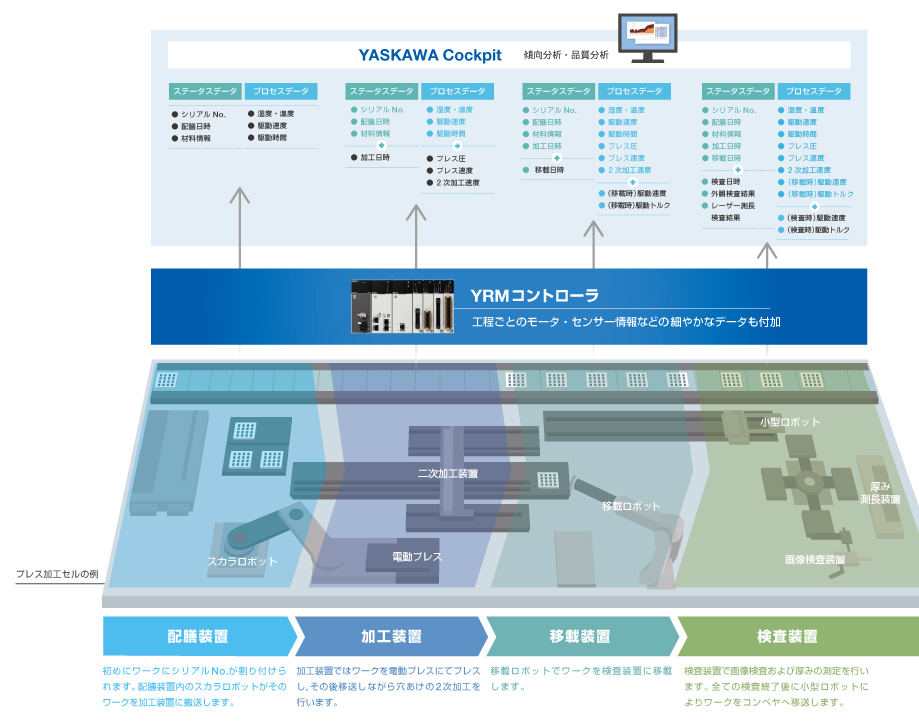
YRMコントローラは、セル全体を制御するためのCPUユニットに加え、データ収集・フィードバックを行うためのIoTユニットを準備し、ユニット間の接続に高性能バスを採用することで高速・大容量なデータ転送を実現しました。YRMコントローラのシステムでは、セルを制御するYRMコントローラ自らがデータの収集も行います。このため、データ収集専用のユニットを取り付けてデータを収集するだけのシステムに比べて、セルの制御とタイミングを完全に一致させたデータの収集が可能です。セルの制御に必要な情報はYRMコントローラに集まっているため、セルの制御に関連したワークの情報や装置の時系列データなどセル内のすべてのデータを統合的に時間が一致した状態で収集できます。
YRMコントローラと連携して動作するYCPでは、セル全体のデータを一元収集・蓄積し、時系列に同期された状態でデータを解析し、YRMコントローラへフィードバックすることができます。YCPが生産設備の近くに設置されていることで、解析アプリにてデータをリアルタイムに解析し、"いつもと違う"や"変化の予兆"などを検知してセルの制御へ即座に反映できます。また、ワーク情報を装置・ロボットの時系列データとともにYRMコントローラで収集しYCPに蓄積できるため、ワークの品質に問題が生じた場合でも、ワーク情報とひも付けた各装置・各ロボットにおける要因解析が可能です。

 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト サーボモータ
サーボモータ
 インバータ
インバータ
 産業用ロボット
産業用ロボット











 財務・業績
財務・業績










 安川グループの
安川グループの コーポレート・ガバナンス
コーポレート・ガバナンス