Vol.85 No.1 2020年の技術の成果
巻頭言
代表取締役社長
小笠原 浩
Hiroshi Ogasawara
2020年は,新型コロナウイルス感染症(以下,コロナ)が拡大・蔓延した年でした。逝去なされた方々に深く哀悼の意を表するとともに,罹患された方々に心からお見舞い申し上げます。
当社の業績もコロナの感染拡大の影響により,グローバルに設備投資を控える動きが拡大し,総じて厳しい状況となりました。一方,中国においては急速に経済活動の正常化が進んだことに加えて,次世代通信規格5G を中心としたニューインフラ関連投資が積極的に行われ,当社の業績を下支えする力となりました。その他の地域についても,コロナ禍の収束は見えないものの米国の自動車販売が回復傾向にあるとともに,半導体市場全般の上昇機運にも支えられ,具体的な設備投資の動きが出てきました。
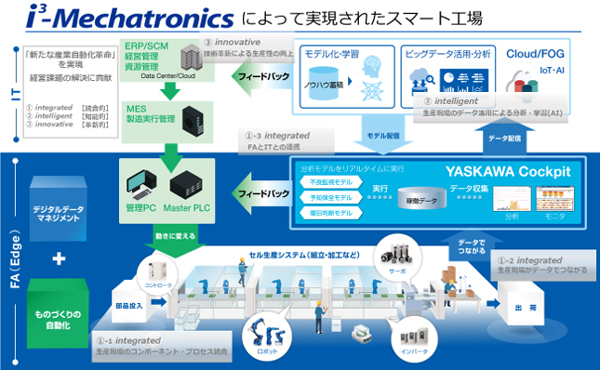
このような状況下,当社は長期経営計画「2025年ビジョン」の第2ステージとなる新中期経営計画「Challenge 25」達成に向けて取組みを進めてきました。「Challenge 25」では,「i3-Mechatronics(アイキューブメカトロニクス)によるビジネスモデル変革」を基本方針の一つと定めており,技術開発面では「i3-Mechatronics」の推進に向けた開発力の強化を図るため,安川テクノロジーセンタの開設に向けた開発体制の統合化を加速させました。そして,「i3-Mechatronics」の推進とともに「YDX(YASKAWA Digital Transformation)プロジェクト推進による“デジタル経営の基盤構築”」を掲げ,2020年をYDX 元年としての活動を本格化させました。DX(デジタルトランスフォーメーション)という言葉は,コロナ禍の影響で世の中に急速に広がりましたが,YDX は「IT の浸透が人の生活を更に豊かにする」という一般的な定義を「デジタル経営がビジネスモデルを変革し,競争の優位性を確立する」当社流に置き換えたもので,テレワークの定着や各種情報の一元化など具体的な成果が上がっています。
2020年の個別事業分野の技術開発については以下のとおりです。
モーションコントロール事業では,新世代オープンフィールドネットワークMECHATROLINK-4対応製品を拡充し,コントローラ・サーボドライブ製品への適用を進めました。汎用小型高機能インバータGA500にも予兆検知機能を搭載し,止まらない機械・設備を実現することで安定生産に貢献しています。ロボット事業では,「i3-Mechatronics」をコンセプトに,データを基に動きを変換できるYRM コントローラ(仮称)の開発を進めており,セル単位のデジタルツインシステムを構築します。そして,将来的にはセルのDX 化を目指します。一方5Gの導入などの情報通信技術の革新により,今後も大きな拡大が見込まれる3C(Computer,Communication,Consumer)や半導体分野において新規自動化をけん引する人協働ロボット(MOTOMAN-HC シリーズ),スカラロボット,半導体ウエハロボット(SEMISTAR シリーズ)のラインアップを拡充させ,適用拡大を図っています。システムエンジニアリング事業では,鉄鋼システムにおいてコロナ禍でも対応できるリモート試運転を実施しました。また,AI を活用した下水処理運転管理支援技術の研究を進展させています。クリーンパワー事業では,太陽光発電用パワーコンディショナXGI1500日本仕様を製品化しました。研究開発でも,デジタルツインによるソリューションのため環境ビジョンシステムの開発に取り組んでいます。さらに,中国で施行されているNEV(New Energy Vehicle)規制への対応として高い動力性能と航続距離拡大を両立させた小型高効率ドライブシステムを開発しました。
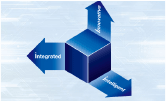
2021年は,いよいよ安川テクノロジーセンタが稼働します。安川テクノロジーセンタでは当社グループ全体とオープンイノベーションにより顧客が勝てる製品をタイムリーに開発する技術集約拠点として,「i3-Mechatronics」を実現します。このi3-Mechatronics は,integrated,intelligent,innovative の3つの“i”のステップで進めていきます。開発プロセスの統合(integrated)では,当社グループ全体の技術を集約することで基礎技術から量産試作まで生産技術を含めて一体開発します。知の集約と創造(intelligent)では,市場情報も含めて,他社,自社技術の強み弱みをタイムリーに的確に共有し,勝てる製品を創造します。革新的技術の創出(innovative)では,産学連携を中心としたオープンイノベーションの推進により飛躍的な技術革新を興し,農業,食品,物流などの新規ビジネスの創出を探索していきます。今後とも新たな事業領域に挑戦し続ける当社のソリューションにご期待ください。
[モーションコントロール事業] AC サーボモータ累積出荷台数2000万台を達成
当社のAC サーボモータは1983年に市場に投入して以来,2020年8月に累積出荷台数2,000万台を達成した。
現在の主力機種であるΣ-7シリーズは,生産現場でのIoT 化を進めるためのデータ検出機能を強化するなど進化を続けており,国内外の多くの顧客に使用いただいている。
[モーションコントロール事業] MECHATROLINK-4対応製品の拡充
i3-Mechatronics(アイキューブメカトロニクス)は生産現場の視える化など,デジタルデータソリューションによって生産性の向上や止まらないラインの実現を図るソリューションコンセプトである。この実現に向け,従来のオープンフィールドネットワークMECHATROLINK-Ⅲと比べて伝送効率が4倍のMECHATROLINK-4に対応したAC サーボドライブΣ-7SMECHATROLINK-4通信指令形,およびマシンコントローラMP3000シリーズ用モジュール1種の計2製品を販売開始した。これらの製品により装置性能を最大限に引き出すモーション制御や,様々なセンサーやモーションのデータを遅れなく上位層へ伝送することが可能となり,スマートファクトリーの実現に貢献する。
AC サーボドライブΣ-7S
MECHATROLINK-4通信指令形

MECHATROLINK-4対応
MP3000シリーズ用モジュール
SVF-01
[モーションコントロール事業] インバータ製品の拡充
コロナ禍により世界中で人々の移動が制限されるなか,インダストリ4.0を始めとするIoT(Internet of things)を利用した生産性向上への関心が更に高まっている。それに伴い,様々なものづくりの現場で発生するビッグデータの収集・視える化,および蓄積・解析により,止まらない機械・設備の実現が求められている。
これらの要求に応えるため,予兆検知機能付きインバータGA700/GA500を製品化した。インバータは,モータを駆動しながら機械の状態を監視し,監視したデータを解析することで,機械のトラブルを未然に防止する。また,小型高機能タイプインバータGA500をベースとした環境対応フィンレスインバータを製品化した。これにより,ファン交換やフィン清掃などのメンテナンスが不要となり,設備の生産性向上を実現する。
-

GA700 GA500 予兆検知機能付きインバータ
-
 環境対応フィンレスインバータGA500
環境対応フィンレスインバータGA500
[モーションコントロール事業] 主な広報・展示会
第23回関西機械要素技術展(2020年10月7~9日,インテックス大阪)では,「データ活用による装置の付加価値向上につながるヒントがここにある」をテーマに,顧客の課題である「予防保全」「生産性向上」「品質安定」を解決するための様々な製品,ソリューションを展示実演した。当社のソリューションコンセプトi3-Mechatronics を具現化したコンセプトデモ機は東京地区以外では初出品であった。特に,YRM コントローラ(仮称,開発中)によるセル全体のデータを収集分析し,「『装置を超えて動きに変える』を表現した実演デモ」は多くの来場者の関心を得た。また,インバータによるコンベヤ故障予知デモ機,センサーネットワークΣ-LINKⅡデモ機,モーションとロボットの同期制御デモ機などを展示した。さらに,2020年度からアフターサービスを行うグループ会社を統合したこともあり,リモートグラスを使用して,YASKAWA コンタクトセンタと現場をつなぐバックオフィス体制を紹介した。
[ロボット事業] 市場の状況と当社の取組み概略
2019年度は米中貿易摩擦の影響により需要減となっていた。市場回復を期待していた2020年度であったが,世界的に猛威を振るうコロナ禍により経済活動全般の失速で需要が減少し,市場回復とならなかった。
現在は一時的な需要減となっているが,元来の労働力人口の不足などによる自動化ニーズ自体に大きな変化はない。併せてグローバルでの人協働ロボットのニーズが顕在化してくるなど,ロボット産業は依然発展途上であり,それに伴う需要は成長を続けるものと考える。既に中国市場は自動車産業の回復を足掛かりにロボット需要の回復が目覚ましく進んでおり,欧州・米州においても一部の顧客における設備投資の動きが具体的に回復してきている。日本でも自動車産業の業績回復が進むなど需要の増加が期待できる状況となってきている。また,5G 投資を背景とした半導体製造装置販売額は過去最高を記録しており明るい兆しとなっている。
今後は,需要の回復・増加を確実に捕捉することはいうまでもないが,市場の新たなニーズに対する準備を当社のソリューションコンセプトであるi3-Mechatronics の考えの下で実現するキープロダクトの開発を進めていく。
[ロボット事業] 開発の方向性
i3-Mechatronics 実現のため,プロセスデータとステータスデータを基軸にデータの活用性を高め,ユーザーのソリューションの質を高めていく活動に取り組んでいる。そのなかにおいてセルを制御し,装置とロボットの同期データを収集し,データを基に動きに変えることが可能となるYRM コントローラ(仮称,開発中)でセル単位の設備のデジタルツインを実現する。そして,将来的には全体のデータ連携となるセルのDX(デジタルトランスフォーメーション)化につなげることが重要である。このようなトレンドに向って「モノ(製品)」を確実に進化させていくことを目指している。
一方,アプリケーションの拡大,新規自動化の広がりをけん引するであろう人協働ロボットの実用化を推進している。人協働ロボットは,コロナ禍においてますます注目を浴びている自動化推進において,既存ロボットユーザーにとどまらず,新たに自動化に取り組むロボットビギナーのユーザーに向けて,導入の動機付けとなる製品である。
さらには,子会社である㈱エイアイキューブとの協業によりAI 技術の活用を進めている。
[ロボット事業] 新製品の市場投入
i3-Mechatronics の実現を下支えする製品の開発を進めてきた。小型ロボットのラインアップを拡充する4kg可搬の高速ハンドリングロボットMOTOMAN-GP4,YRC1000コントローラに対応し可搬質量を従来機種よりも拡大し,使いやすさを向上したパレタイジングロボットMOTOMAN-PL190,-PL320,食品業界向けに無塗装のMOTOMAN-GP8,一般産業向けの塗装ロボットMOTOMAN-MPXL2600,また人協働ロボットHC シリーズの機能改善など顧客のニーズに応える数多くの製品を市場に投入した。
また,半導体ウエハ搬送用としてSEMISTAR-MU124D シリーズを開発し,ラインアップを拡充した。
-

ハンドリングロボット
MOTOMAN-GP4
-

パレタイジングロボット
MOTOMAN-PL190
-

塗装ロボット
MOTOMAN-MPXL2600
[システムエンジニアリング事業] システムエンジニアリング事業全体
コロナ禍は働き方にも大きな変化をもたらし,様々な業種で在宅での勤務形態が模索され実践された。システムエンジニアリング業務においても,設計打合せはWeb 会議システムなどを利用したリモート打合せにて対応できたが,生産物を顧客に確認いただく立会検査や実際にプラントを動かす現地試運転調整は出張・訪問を伴うため,実行が困難であった。そこで,工場内からテレビ中継のように完成した製品を顧客に配信し,確認いただくリモートでの立会検査を実施した。また現地試運転調整では,安全確認が必要な操作など最小限の現場対応とした。納入したシステム機器をインターネット経由で当社工場の基地局と接続することで監視・操作を行い,その状況をWebカメラなどのIoT 機器からも得ながらリモートで実施した。規格認証工場定期監査についてもIoT を駆使して遠隔からの監査・更新を実現した。
コロナ禍がしばらく続くことを前提に,リモート対応が必要とされる機会は多くなると思われる。更なるIT 整備により,より安全で効率的な手法を確立し,タイムリーな設備立上げへの顧客ニーズに応えていきたい。また,生産活動においても人の移動を抑えた勤務形態や人との接触がない業務環境を目指す動きも加速されるのではないかと考えている。
今後は,2020年度から利用が開始され始めた5G 通信を駆使した生産現場での遠隔操作や生産設備の完全自動化などを提案し,コロナ禍での働き方改革にも貢献していく。
[システムエンジニアリング事業] 鉄鋼・産業システム
東京オリンピックも延期されリーマンショック超えの落込みとなった日本経済ではあるが,当社のシステム電気品の主な納入先である素材産業では,新型コロナ感染拡大の影響は2020年度の市況としてはそれほど大きくはなかった。しかしながら,自動車販売台数の大幅減の影響は様々な関連産業に打撃を与えており,鉄鋼業界も数箇所の製鉄所において,そのシンボル的存在である高炉の休止を余儀なくされた。年度後半には中国経済が急速に回復し,日本政府の積極的な経済対策もあり少し落着きを取り戻そうとはしているが,まだまだコロナ禍での先行き不透明な経済環境は続きそうである。
[システムエンジニアリング事業] 社会システム
2019年までは,昨今のゲリラ豪雨や台風などの自然災害に対する備えとして国土強靭化の方針に基づきBCP〔Business Continuity Planning(事業継続計画)〕が問われていた。2020年は,コロナ禍で特に公共インフラについては,いかに事業を安心・安全に継続できるかを問われた年となり,求められる方策に変化が生じている。上下水道を始めとした公共のインフラ設備の運転/サービス提供のためには,運転/操業/維持管理に携わる「人」が不可欠である。しかし,コロナ禍による働き方の変化もあり「人」についての備えに対して,AI 技術を通してベテランのノウハウを踏襲し,経験値が少ない人材でも対応を可能とすることでBCP に貢献する活動を強化した。
-
水処理制御支援技術
-
画像診断支援技術
[システムエンジニアリング事業] 環境エネルギー
2020年1月,日本政府は脱炭素社会の実現に向けた「革新的環境イノベーション戦略」を策定した。そのなかで重要開発テーマ5分野の最初の柱として「エネルギー転換」分野が掲げられており,「新たな素材や構造による太陽光発電の飛躍的な効率向上と低コスト化による,再生可能エネルギーの主力電源化を図る」ことが明記された。このような状況も重なり,パワーコンディショナは太陽光発電システムのキーコンポーネントとして,産業用高圧および発電事業者用特別高圧セグメントにおけるシステムコストの低減に寄与することが求められている。
これらのニーズに応えるため,当社は国内では2018年に製品化したXGI1000(出力65kW)に続き,今回,高電圧かつ高出力のXGI1500(出力150kW)を製品化した。また,太陽光発電事業を支えてきた固定価格買取制度(FIT)に関しては,買取価格が2012年では40円/kWh であったのに対し,2020年では12円/kWh と1/3以下まで下がっているということもあり,FIT 向けの太陽光発電事業は転換期を迎えている。しかしながら,依然としてFIT 市場でのニーズがあるため,当社は2016年に製品化したEnewell−SOL P2HのJET認証を更新した。この認証は最新の系統連系規程に対応かつ広義対応している。
-

太陽光発電用パワーコンディショナ
XGI1500
-

太陽光発電用パワーコンディショナ
Enewell-SOL P2H
[研究開発] 東京工業大学とYASKAWA 未来技術共同研究講座を開設
当社と国立大学法人東京工業大学は,2020年4月に人協働ロボット用の超軽量アクチュエータの研究のため,「YASKAWA 未来技術共同研究講座」を開設した。
人協働ロボットは人間と同じ空間で,人間と作業を分担したり,人間の作業を補助したりするロボットである。十年後の超軽量人協働ロボットの実現をゴールに,その第一歩として,駆動源として使われる超軽量アクチュエータの研究に材料,モータ,ロボティクスなどの研究者を集結して取り組む。講座教員,講座所属学生,共同研究担当教員が一丸となって,当社がモータ,ロボット,メカトロニクスで培った技術に東京工業大学の英知を加味し,ロボットの用途拡大を目指した人協働ロボットの実現に挑戦する。
また,この講座を通じて,日本の将来を担う優秀かつ独創的な発想ができる技術者・研究者の育成にも寄与していく所存である。
[研究開発] 「技術研究組合産業用ロボット次世代基礎技術研究機構」を設立
⑴ 技術研究組合設立の目的
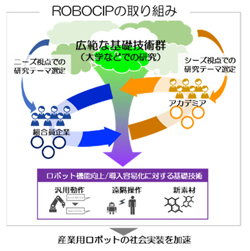
日本のロボット産業は,アジアを含めたグローバルでの追上げにより極めて厳しい競争環境にさらされている。競争力強化のため,基礎技術研究分野において,スピード感を含め,拡大・深化が不可欠である。この実現のため,2020年7月にロボットメーカー6社で連携して技術研究組合【略称「ROBOCIP」(ロボシップ)】を設立した。これにより,技術革新の基盤が強化され,産学連携して研究を進めることができる。
⑵ 研究内容
基礎技術研究分野の三つの研究項目(「モノのハンドリングおよび汎用動作計画に関する研究」「遠隔制御技術に関する研究」「ロボット新素材とセンサー応用技術に関する研究」)を定め,多品種少量生産現場を始めとするロボット未活用領域においても対応可能な産業用ロボットを実現するための要素技術を確立する。また,得られた成果に基づき,実現場を模した環境での実証試験を行い,産業用ロボットの更なる普及を目指す。
[研究開発] 電気学会産業応用部門研究会優秀論文発表賞を受賞
2019年9月に開催されたメカトロニクス制御研究会で発表した「カスケード型位置制御系の次数とパラメータの同時最適化」が,2020年3月31日付の電気学会産業応用部門研究会優秀論文発表賞を受賞した。この賞は,2019年度授与された電気学会メカトロニクス制御技術委員会優秀論文賞のなかから特に優れたものに与えられる賞である。
本技術は,機械の特性データ(周波数応答データ)を用いてサーボモータの制御器を自動的に調整する技術であり,一般的によく用いられるPID 制御器だけでなく,各種フィルタ類のパラメータと数も調整可能にしたことが特長である。顧客が時間と手間をかけずにサーボモータを簡単に利用できることを目的として研究開発に取り組んでおり,工場自動化/最適化を体現するEasy to Use 機能としての実現を目指している。
なお,本研究は東京大学の堀・藤本研究室との共同研究の成果である(詳細は,技術論文「位置制御システムのデータ駆動型自動調整」を参照)。
[技術論文] 人協働ロボットと適用事例
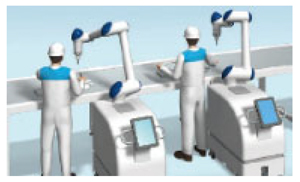
現在の製造業においては,労働人口不足や生産性向上への課題に加えて,モノづくりの多品種少量生産への要請もあり,ロボットが人と同じ空間で作業する生産システムを実現するため,人協働ロボットが注目されている。
これに応えるため,当社は,安全性と使いやすさを備えた人協働ロボットの開発に取り組み,「人協働ロボットMOTOMAN-HC シリーズ」を製品化した。本ロボットは国際規格ISO10218-1に適合した安全性を備えており,ロボットの操作経験が少ないユーザーでも簡単に操作や教示を可能とする特長を有している。
本稿では,人協働ロボットHC シリーズの安全性,使いやすさ,適用事例および今後の展望について述べている。
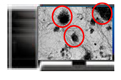
[技術論文] 下水処理場へのAI 適用の取組み
水処理制御支援技術
画像診断支援技術
当社は,国土交通省の下水道革新的技術実証事業(B-DASH プロジェクト)のFS 調査「AI を活用した下水処理運転管理支援技術に関する研究」において,「水処理制御支援技術」,「画像診断支援技術」からなる「AI を活用した水処理制御支援技術」の開発・性能検証などを2018~2019年度に実施した。「水処理制御支援技術」では複数の処理場を対象としてMAPE (平均絶対パーセント誤差)などを用いて評価し,「画像診断支援技術」では微生物が単独で存在する場合と複数種の微生物が同時に存在する場合での認識率を検証した。
「水処理制御支援技術」では異なる規模の処理場でも適用可能であることを確認したが,学習用データやパラメータは個別に検討が必要であることを確認した。また,「画像診断支援技術」では今回の範囲内では,微生物を単一・複数で区別することなく同一のパラメータで適用可能であることを確認した。
本稿では,上述の結果をまとめるとともに今後の取組みについて述べている。
[技術論文] 位置制御システムのデータ駆動型自動調整
本稿では,サーボモータの位置制御器自動調整技術について述べる。この技術の特長は,サーボモータが組み込まれる装置の機械特性(周波数応答データ)を基に,制御器のパラメータ・フィルタの数を自動的に調整する点である。装置に外乱が加わった際に,位置への影響が最小になる(外乱抑圧特性が最適になる)ように制御器の自動調整を行い,1軸の精密位置決め装置で効果の検証を実施した。今後は,当社が提唱するi3-Mechatronics を軸とした工場の自動化/最適化を具現化したサーボモータの自動調整機能として研究開発を続けていく。
なお,本研究は東京大学藤本研究室との産学連携の成果である。
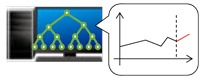
[技術論文] 柔軟な把持条件のカスタマイズが可能な学習ベースのばら積みピッキングシステム
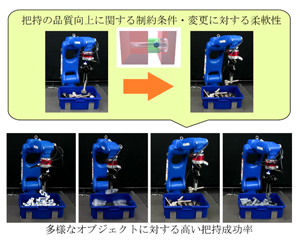
実用的なばら積みピッキングシステムには,多様なオブジェクトに対する高い把持成功率と,把持の品質向上に関する様々な制約条件やその変更に対する柔軟性が求められる。当社は,これらの問題を解決するため,シミュレータと深層学習を用いた新たなばら積みピッキングシステムを提案する。提案手法は,実環境における高精度な把持動作の生成,および品質改善をシミュレータというデジタルな環境へのデータの与え方を変えるプロセスによって実現する。提案手法を用いたシステムは,多様なオブジェクトに対する高性能な把持動作の生成を深層学習によって自動的に獲得し,制約条件への適応を,シミュレーション環境内で生成される把持姿勢の教師データの洗練と再学習によって実現する。
本稿では先行研究との比較実験により,異なる特性を持つオブジェクトの把持成功率と制約への適応性について提案手法の優位性を示す。

 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト サーボモータ
サーボモータ
 インバータ
インバータ
 産業用ロボット
産業用ロボット











 財務・業績
財務・業績










 安川グループの
安川グループの コーポレート・ガバナンス
コーポレート・ガバナンス