Global
Global





























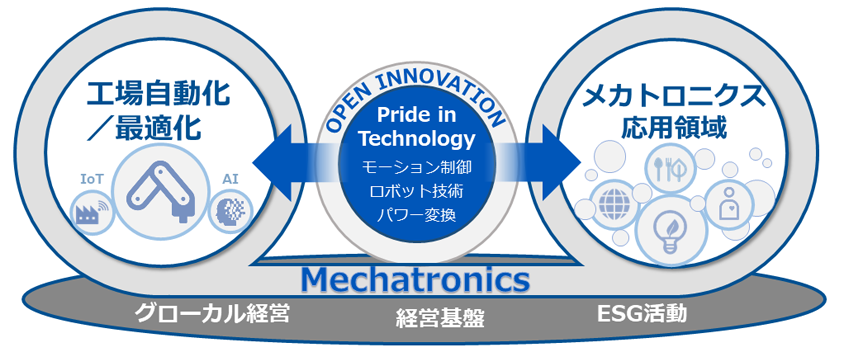
コア技術Core Technology
モータを回して100年。
安川電機は技術立社を社是とし、
「モータとその応用」に関する技術開発に日々取り組んでいます。
 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト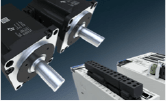 サーボモータ
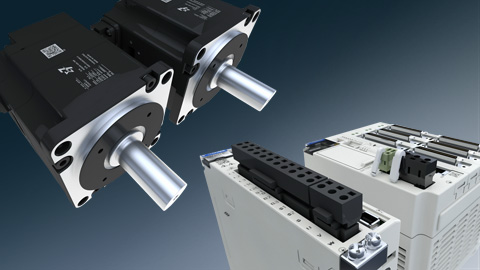
サーボモータ
 インバータ
インバータ
 産業用ロボット
産業用ロボット
 財務・業績
財務・業績
 安川グループの
安川グループの コーポレート・ガバナンス
コーポレート・ガバナンス
モータを回して100年。
安川電機は技術立社を社是とし、
「モータとその応用」に関する技術開発に日々取り組んでいます。

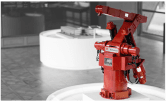
産業用ロボットは、自動車関連市場をはじめてとして3C市場(コンピューター、通信、家電)や三品市場(食品・医薬品・化粧品)など、さまざまな産業分野における溶接、塗装、組立、搬送などの自動化のため使用されています。産業用ロボットは、主に機構部であるアームと、そのアームの動作を制御するロボットコントローラから構成されます。ロボット技術はアームを構成する機構に関するロボットアーム技術と、アームの動きを制御するロボット制御技術から構成される技術群です。
産業用ロボットの代表的なアームの機構は垂直多関節型で当社の主力製品でもあります。ほかにも水平多関節(スカラ)型やパラレルリンク型の機構のロボットもあり、これらの機構を実現するためにロボットアーム技術が適用されます。ロボットアーム技術とは、アーム構造、アクチュエータ(モータと減速機のモジュール)、動力伝達機構、リンク形状などのメカの設計・製造技術などを総合した技術群です。ここでは代表的なアームの形状について特長を説明します。
 垂直多関節型は、いろいろな作業に適用しやすい汎用性を備えた6軸または7軸のアーム構造で人に近い動きができます。しかし、剛性が低く高速動作時は振動が生じるといった側面もあります。その課題を解決するため、アーム素材や構造、アクチュエータ、動力伝達機構の改良を行っています。そのため構造設計では解析技術によるシミュレーションを用いています。
垂直多関節型は、いろいろな作業に適用しやすい汎用性を備えた6軸または7軸のアーム構造で人に近い動きができます。しかし、剛性が低く高速動作時は振動が生じるといった側面もあります。その課題を解決するため、アーム素材や構造、アクチュエータ、動力伝達機構の改良を行っています。そのため構造設計では解析技術によるシミュレーションを用いています。
 5軸の水平多関節型のアプリケーションのひとつである半導体ウエハ搬送ロボットは、シリコンウエハが非常に薄く割れやすいのに、半導体製造装置内での高速搬送が求められています。そこでギア(減速機)をなくしたDD(ダイレクトドライブ)モータによる駆動方法を開発することで、高い絶対位置精度や繰返し位置決め精度が可能になり、高精度かつ振動の少ない動作を実現しています。
5軸の水平多関節型のアプリケーションのひとつである半導体ウエハ搬送ロボットは、シリコンウエハが非常に薄く割れやすいのに、半導体製造装置内での高速搬送が求められています。そこでギア(減速機)をなくしたDD(ダイレクトドライブ)モータによる駆動方法を開発することで、高い絶対位置精度や繰返し位置決め精度が可能になり、高精度かつ振動の少ない動作を実現しています。
 パラレルリンク型は並列(パラレル)に動作する機構で、シリアルリンク構造の垂直多関節型のロボットと比較して、対象物の高速搬送など高速な動作・高い精度や剛性を備えています。 中空ボディ構造とすることによりアーム内にエアバルブの設置を可能にしました。また、自己潤滑樹脂を使用することでボールジョイント部のグリースレスを実現しました。
パラレルリンク型は並列(パラレル)に動作する機構で、シリアルリンク構造の垂直多関節型のロボットと比較して、対象物の高速搬送など高速な動作・高い精度や剛性を備えています。 中空ボディ構造とすることによりアーム内にエアバルブの設置を可能にしました。また、自己潤滑樹脂を使用することでボールジョイント部のグリースレスを実現しました。
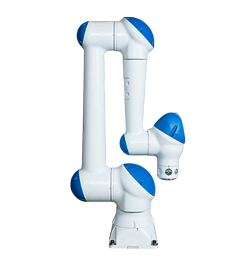 人協働ロボットは文字通り人と同じ空間で協働して作業を行うためのロボットです。作業員の指や手が挟まれにくい構造設計を行い、人との接触による危害を最小限に抑えるトルクセンサを組み込んだ安全機能などを適用しています。
人協働ロボットは文字通り人と同じ空間で協働して作業を行うためのロボットです。作業員の指や手が挟まれにくい構造設計を行い、人との接触による危害を最小限に抑えるトルクセンサを組み込んだ安全機能などを適用しています。
人協働ロボット特設サイト
ロボット制御技術は、産業用ロボットのアームに指定した動作をさせるための技術です。そこでは、複数のモータを協調させてアーム手先の振動を抑えながら高速・高精度に動作制御する技術や、アームが障害物を回避するといった効率的かつ最適な経路・作業順番を自動で計算するプランニング技術などが用いられています。動作制御には運動学、補間技術、センサ利用技術などが含まれるほか、動作制御技術とプランニング技術をIoTで融合したデジタルツイン技術の開発も行っています。

3つのコア技術を統合させた
技術開発拠点 安川テクノロジーセンタ(YTC)
拠点のご紹介 >
![]()

Copyright © 2003‐2025 YASKAWA ELECTRIC CORPORATION.