|
1. 主な特長
|
| |
(1)
|
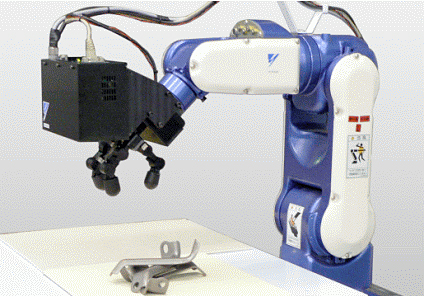
レーザスリット光を用いたレーザ照射部、その反射光を読み取る画像処理部、三角測量の原理により三次元形状を計測し、対象物の種類や位置、姿勢を認識する計測・認識処理部がひとつのユニットの中に収められており、計測と認識を同時におこなうことができます。
|
| |
(2) |
三次元形状の計測により、バラ積みのワークや傾いたワークも精度良く(±1.0mm)認識することができます。 |
| |
(3) |
高速画像処理チップの採用により、計測を4msec周期、三次元形状認識を1sec周期で高速処理が可能です。 |
| |
(4) |
ユニットはコンパクトなサイズ(幅190 mm×奥行き120 mm×高さ83 mm)でかつ軽量(約1.4 kg)を実現し、接続ケーブルは電源線と信号線のみと省配線を実現しましたので、ロボットアーム等に容易に搭載することができます。 |
| |
(5) |
上位制御装置との接続インタフェースにはEthernet注1を、プロトコルとしてCORBA注2
インタフェースを準備していますので、上位制御装置にて用途に応じたアプリケーション・ソフトウェアを開発することができます。
注1 Ethernetは米国Xerox Corp.の登録商標です。
注2 CORBAはObject Management Group の登録商標です。
|
| |
|
|
|
2. 構成例
|
| |
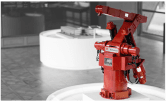
ロボットアームに三次元形状計測ユニットを取り付けた場合の構成は、以下のようになります |
| |
|
| |
|
|
全体構成
|

 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト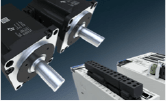 サーボモータ
サーボモータ
 インバータ
インバータ
 産業用ロボット
産業用ロボット











 財務・業績
財務・業績










 安川グループの
安川グループの コーポレート・ガバナンス
コーポレート・ガバナンス