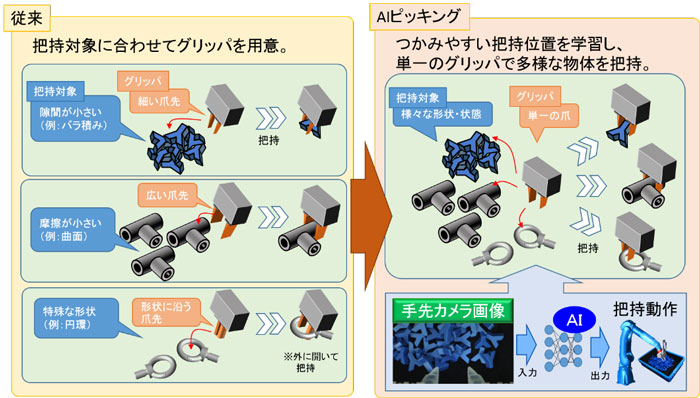
近年、生産ライン自動化ニーズの多様化により、ロボットに求められる作業のレベルが高度化しています。従来のバラ積み部品のピッキングシステムでは、対象物ごとに多様な把持動作を教示する必要があり、ユーザーにとって大きな負担となっています。また、把持を確実に実行するために、対象物に合わせてグリッパ*²を専用設計し用意する必要があり、システム導入への障壁の一つとなっていました。
当社では長期経営計画「2025年ビジョン」で、新しい自動化のソリューションを提供することを掲げており、これまでのソリューションにデジタルデータのマネジメントを加えた、新たなコンセプト「i³-Mechatronics(アイキューブ メカトロニクス)」を始動しています。このたび開発したAIピッキング機能は、このコンセプトを具現化するソリューション提供の一環としており、当社のコア技術であるロボット技術と、クロスコンパス社のAI技術を組み合わせることで、バラ積みピッキングの高度化による自動化システム導入の簡易化、生産性の向上を実現していきます。
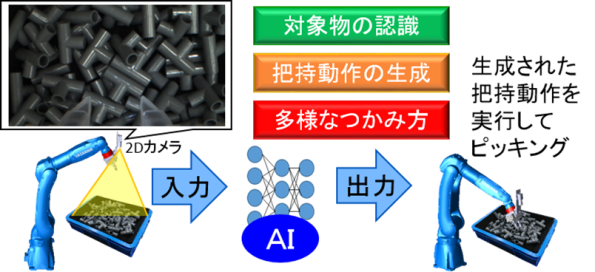
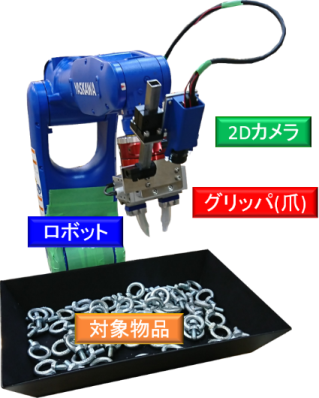
本機能は、ロボットアームの先端に取り付けたカメラからの画像情報をコントローラに入力し、AI(ディープラーニング)を用いてロボット自らリアルタイムに動作を学習・生成するため、教示が不要となります。把持動作中も取得した画像情報をもとに最適な把持位置を解析しながらピッキングを実行するので、対象物の形状や一定の把持位置・方向に合わせたグリッパの設計が不要です。さらに同じグリッパを用いて多数の対象物を学習することで、単一グリッパで多数の物品をピッキングすることができるため、効率的なピッキングシステムが構築可能となります。
部品配膳システムや仕分けシステムへの適用を見込んでおり、今後はより多くの対象物や環境での実証を蓄積し、把持率の向上や対象物の拡大などに取り組んでいきます。

 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト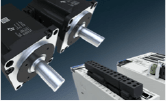 サーボモータ
サーボモータ
 インバータ
インバータ
 産業用ロボット
産業用ロボット











 財務・業績
財務・業績










 安川グループの
安川グループの コーポレート・ガバナンス
コーポレート・ガバナンス