2023年1月10日
背景と課題
近年、生産現場に多くの人協働ロボットが導入されています。人協働ロボットは、安全のために柵で隔離する必要がなく、人と同じスペースを共有しながら一緒に作業できるよう設計されたロボットです。
1.力制御におけるパラメータ調整の現状と課題
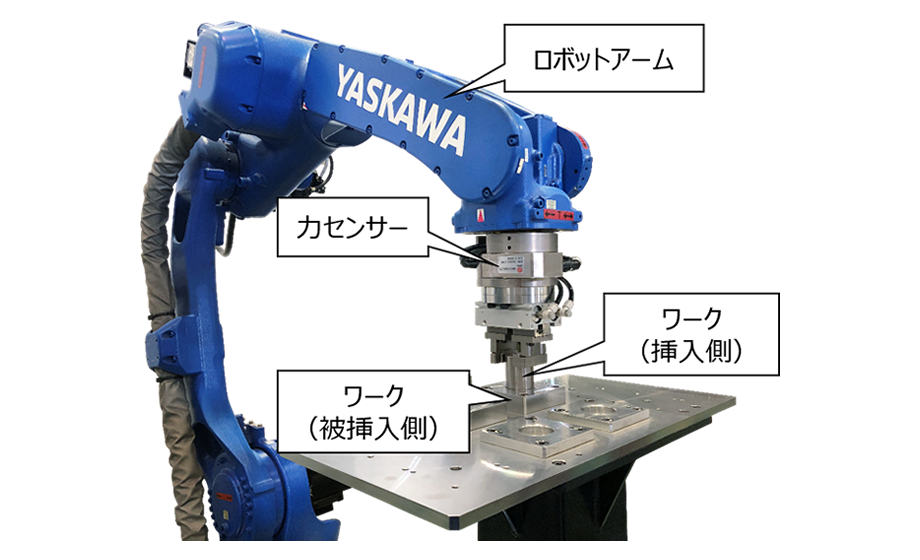
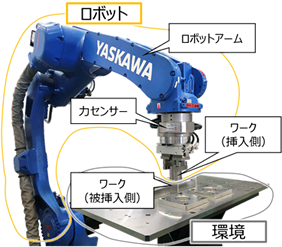
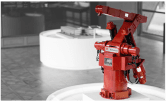
図1 力制御機能MotoFitによるはめ合い作業の様子
はめ合い、研磨、バリ取りなどの作業は巧みな力加減を要し、人の手に頼っています。このような作業をロボットで自動化するためには、人の手に代わるロボットアームで対象物(以下、ワーク)を触りながら巧みな力加減を再現する必要があります。そこで、ロボットアームの手首に力センサー※1 を取り付け、センサーフィードバックにより力制御を構成することで、作業の自動化を可能にしています。当社では、MotoFitという名称でこの力制御機能を製品化しています(図1)。
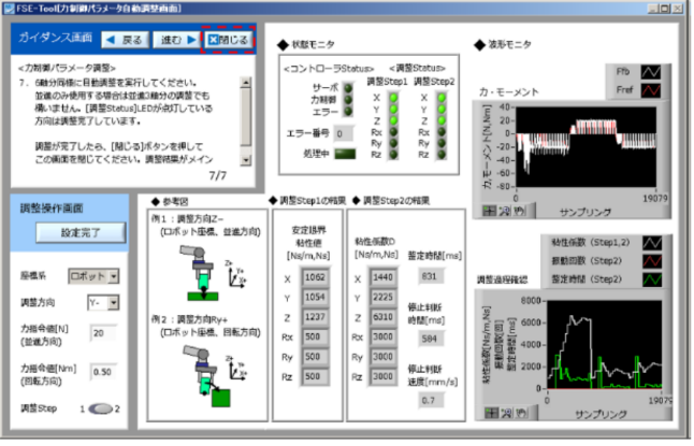
図2 力制御パラメータ調整機能の画面(PC上のソフトウエア)
ロボットが扱うワークは、金属、樹脂、ゴムなど様々な素材があり、ワークごとに力制御のパラメータを調整することで、安定かつ良好な(タクトタイムが短い)動作を実現しています(図2)。しかし、このパラメータ調整を含む力制御機能は、これまで産業用ロボットを扱った経験の少ないユーザーにとっては調整が難しいという課題があります。
2.力制御におけるパラメータ調整レスへの挑戦
図3 人協働ロボットHC10の特長
近年、当社が製品化した人協働ロボットMOTOMAN-HCシリーズでは、産業用ロボットを扱った経験の少ないユーザーでも比較的簡単にティーチングを行うことが可能です。ティーチング操作は、人が直接ロボットのアームをつかんで力を加えながらアームの位置姿勢を変更して行います。これをダイレクトティーチ機能といいます。さらに、安全柵なしで※2 人とロボットの協働作業が可能です。これは、図3に示すように、各関節に備わったトルクセンサー(以下、関節トルクセンサー)の信号
を基に、人とロボットアームとの接触による外力を検知し、ロボットを止めることで安全性を確保しているためです。
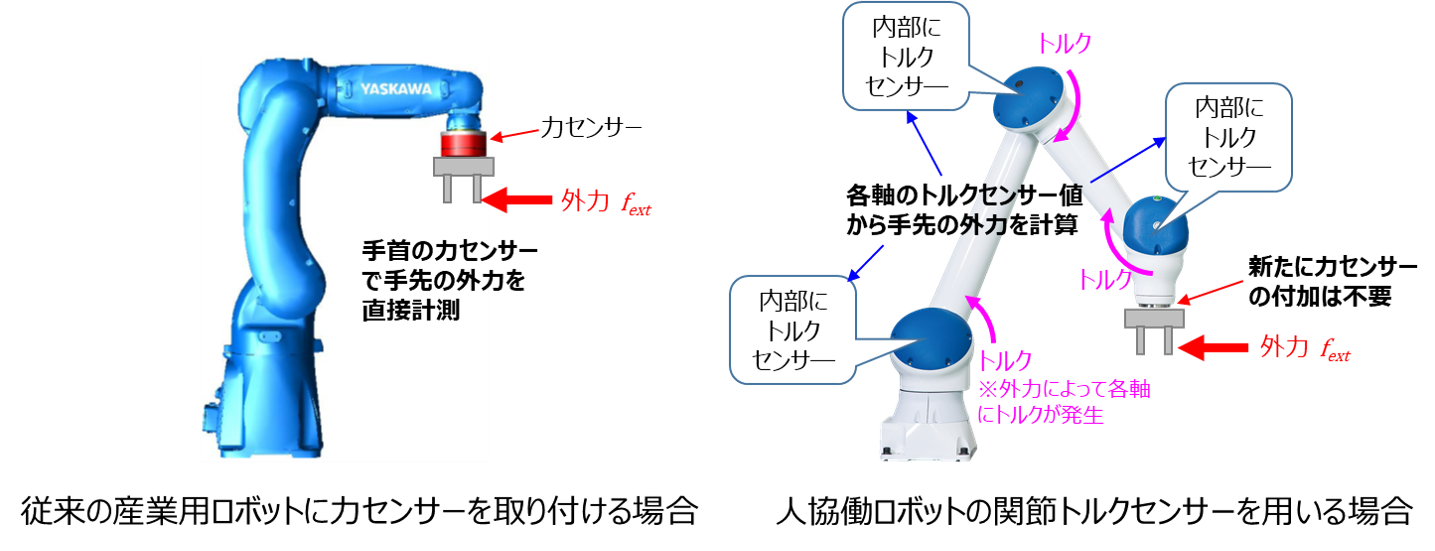
現状では、この関節トルクセンサーを安全機能のための外力検知とダイレクトティーチ機能に利用するだけでなく、関節トルクセンサーで検出したトルクを基にアームの先端が受ける力(外力
fext )を算出することで、アームの手首に力センサーを新たに取り付けることなく、1で述べた力制御を可能としています(図4)。
図4 力制御の構成比較
しかしながら、上述したように、人協働ロボットのユーザーは、従来の産業用ロボットの操作やティーチングに不慣れな場合が多く、様々なワークに応じて力制御パラメータをユーザーが調整するのは難しいと考えられます。そこで、デフォルトパラメータのまま(調整レス)で様々なワークに対して良好な応答を実現できる力制御の開発を国立大学法人九州大学との連携(共同研究)により進めています。
※1 力センサー安全柵なしで
技術内容と特長
1.従来の力制御と課題
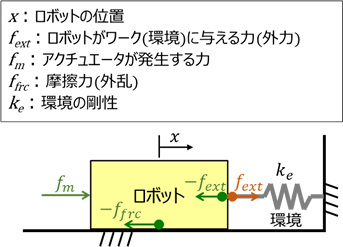
人協働ロボットは、6自由度を持つ垂直多関節型ロボットです。多自由度のロボット動作制御(アームの各関節のアクチュエータ(モータ)トルクを操作し、手先がワークに与える力を制御すること)は複雑であるため、便宜上、1自由度のロボット動作に限定して力制御について説明します。1自由度の模式図(図5)について、はめ合い作業の写真を例に補足します。ロボットがハンドで把持したワーク(挿入側)は模式図の「ロボット」に含まれ、台に固定されたワーク(被挿入側)は「環境」に該当します(図6)。
力制御には様々な方式がありますが、従来の力制御方式としてインピーダンス制御とアドミッタンス制御があります。インピーダンス制御とアドミッタンス制御では、どちらもロボットが、外力fext によってどのように動くかを、慣性Md 、粘性Dd 、剛性Kd の特性パラメータで表される次式
となるように制御します。ここで、fref は目標力(力指令)、xref は目標位置(位置指令)です。
①インピーダンス制御のメリット・デメリット
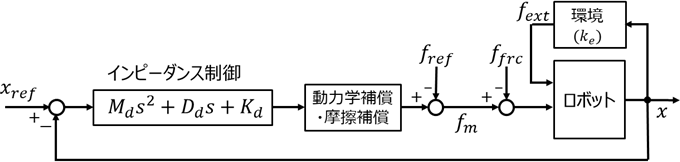
図7に示すようにインピーダンス制御は、位置偏差xref – x に対してロボットアームがどのような力を出すかを決め、そのような力を発生するように制御する方法です。硬い環境との接触に対して比較的安定であるというメリットがありますが、摩擦力ffrc の影響を受けやすく、力の定常偏差が生じるなど想定どおりの動きにならない場合があります。
図7 インピーダンス制御のブロック図
②アドミッタンス制御のメリット・デメリット
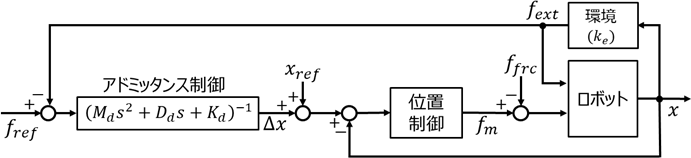
図8に示すようにアドミッタンス制御は、力偏差fref – fext に対してロボットアームがどのような位置に動くかを決め、そのような位置へ動くように制御する方法です。位置制御ベースのインピーダンス制御と呼ばれることもあります。位置制御ループによって外乱が抑制されるため、摩擦の影響を受けにくいというメリットがありますが、硬い環境との接触で振動的になる場合があります。
図8 アドミッタンス制御のブロック図
2.開発する力制御
上記①と②に示す両者の特性から、インピーダンス制御は硬い環境との接触で有利、アドミッタンス制御は柔らかい環境との接触で有利といえます。そこで、このアドミッタンス制御とインピーダンス制御とを直列接続することにより、双方のメリットを生かすことのできるアドミッタンス・インピーダンス制御を提案しました(図9)。本制御則では、まず環境に作用した外力fext を入力として、アドミッタンス制御により手先位置の補正量Δx を計算します。その後、位置指令xref と補正量Δx の和を平衡点としたインピーダンス制御により、発生すべき力fm を計算します。
図9 アドミッタンス・インピーダンス制御のブロック図
このような制御により、硬い環境との接触時にアドミッタンス制御で振動的な挙動があっても後段のインピーダンス制御の作用により低減することができ、柔らかい環境との接触時にインピーダンス制御で摩擦による誤差があってもアドミッタンス制御により修正することができます。その結果、柔らかいものから硬いものまで、様々な剛性のワークを扱えるようになります。
成果
様々な剛性の環境と接触した場合の一軸シミュレーションの結果を図10に示します。このシミュレーションでは、インピーダンス制御とアドミッタンス制御のそれぞれの特性パラメータ(慣性Md 、粘性Dd 、剛性Kd )を環境によらず固定としています。柔らかい環境(剛性ke =10)との接触では、インピーダンス制御(青)は摩擦の影響を受けて大きな偏差を生じていますが、提案法(赤)では偏差が小さく、高速に収束しています。硬い環境(剛性ke =3200)との接触では、アドミッタンス制御(緑)は振動的になっていますが、提案法(赤)では偏差が小さく、高速に収束しています。このように、どの剛性の環境に対しても、同じパラメータ設定のままで従来の制御よりも良い結果(振動小・高応答・偏差小)が得られることを確認しました。
図10 環境合成ke を変えた場合のシミュレーション結果
今後の展望
1自由度のロボット動作での力制御に関する提案法を新たに開発しました。今後は、多軸(多自由度のロボット動作)に拡張し、関節トルクセンサーを備えた人協働ロボットに実装して検証を進め、人協働ロボットで、力制御パラメータの調整をせずに様々な剛性の環境との高速で安定な接触を目指します。さらに、多軸の場合には、例えば曲面に対する倣い動作において、面に垂直な方向と水平な方向で制御特性を変えるなど、より自由度の高い設計が可能になり、提案法をベースに、より高度で複雑な接触作業を実現していきます。
関連記事
本レポートに対するご意見・お問い合わせはこちら

 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト サーボモータ
サーボモータ
 インバータ
インバータ
 産業用ロボット
産業用ロボット











 財務・業績
財務・業績










 安川グループの
安川グループの コーポレート・ガバナンス
コーポレート・ガバナンス